Table of Contents
Rube Goldberg Machine (Team E)
For General Robotics (16-311)
Team E Members: Ben Gilman, Nolan Hergert, Nicholas Russell
Motivations Behind Our Machine
For our Rube Goldberg machine, we wanted to minimize the number of large and complex operations to ensure the highest reliability possible for grading purposes. In this light, we use a simple lever arm to raise the bouncy ball the required 20“ and run the other energy transfers of the machine in a parallel “track” next to it. All of our operations are quickly resettable and are mechanical in nature, which allow for quick prototyping and testing cycles.
YouTube Video!
YouTube Link! https://www.youtube.com/watch?v=2tbCWxAWk78
Energy Transfers
#1

- The ball is caught by a cardboard funnel box and is forced out of a hole in the bottom and stops in a catapult mechanism, in the process hitting a golf ball by way of a turnstile.
#2

- The golf ball rolls down a hill and hits a set of dominoes.
#3-5
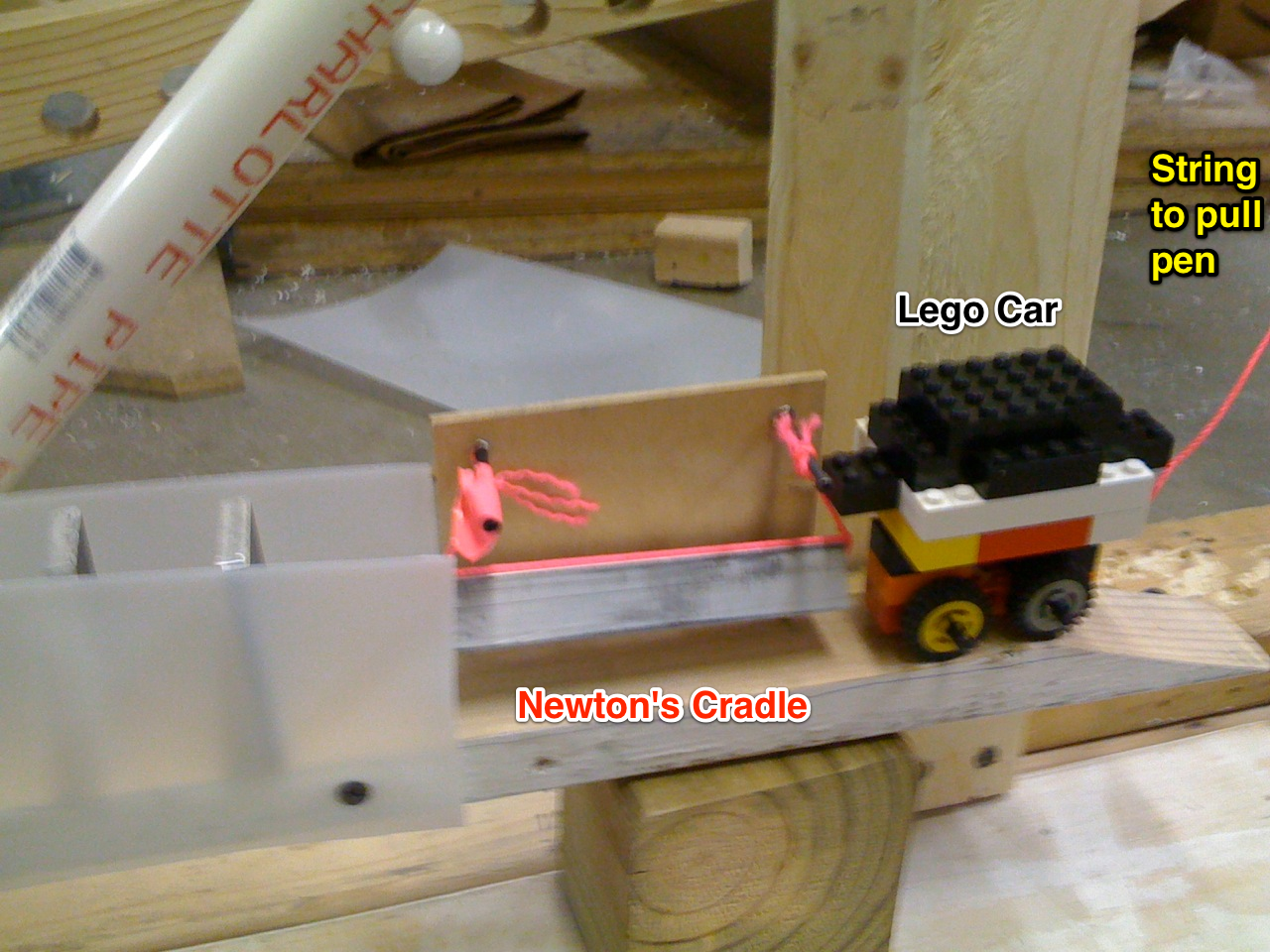
- The dominoes knock themselves down and hit a nearby Newton's Cradle.
- The cradle hits a Lego car.
- The car rolls down and off its track, pulling a pen out from the catapult, which lets the filled plastic bottle rush downwards.
#6

- From this action, the bouncy ball is lifted and released into a slanted tube, which lets the bouncy ball roll out from the machine at the required height of 20 inches.